Building a Remote Controlled Robotic Hand with Strain Gauges
Here at Voltera, we love our test engineering interns. They bring fresh new ideas into our workspace and have a ton of fun exploring with our machines. It’s a privilege to provide mentorship, equipment, and resources to nurture brilliant young minds, and see what they dream up.
A test for V-One and NOVA
At the beginning of his work term, Dawson Martian — a second-year undergrad studying Mechatronics, Robotics, and Automation Engineering at the University of Waterloo — came up with a project idea that would put both the V-One PCB printer and NOVA materials dispensing system to the test: Designing and building a robot hand that would mimic the movements of an operator wearing a control glove.
Dawson had been working on a different project at the time, designing a light-up glove using stretchable silver ink and thermoplastic polyurethane (TPU). “I noticed when the glove was put on and powered, the brightness of the LEDs would vary depending on whether the user’s hand was opened or closed,” he recalled. “This got me thinking about how the lights were dimming due to the resistance of the traces increasing whenever they were stretched, essentially the traces were acting as strain gauges,” he said. “From there I realized I could take advantage of this property and use this varying resistance to control a machine or program…what better way to show this unique property than by having a robotic hand mimic my movements?”
3D printing the hand
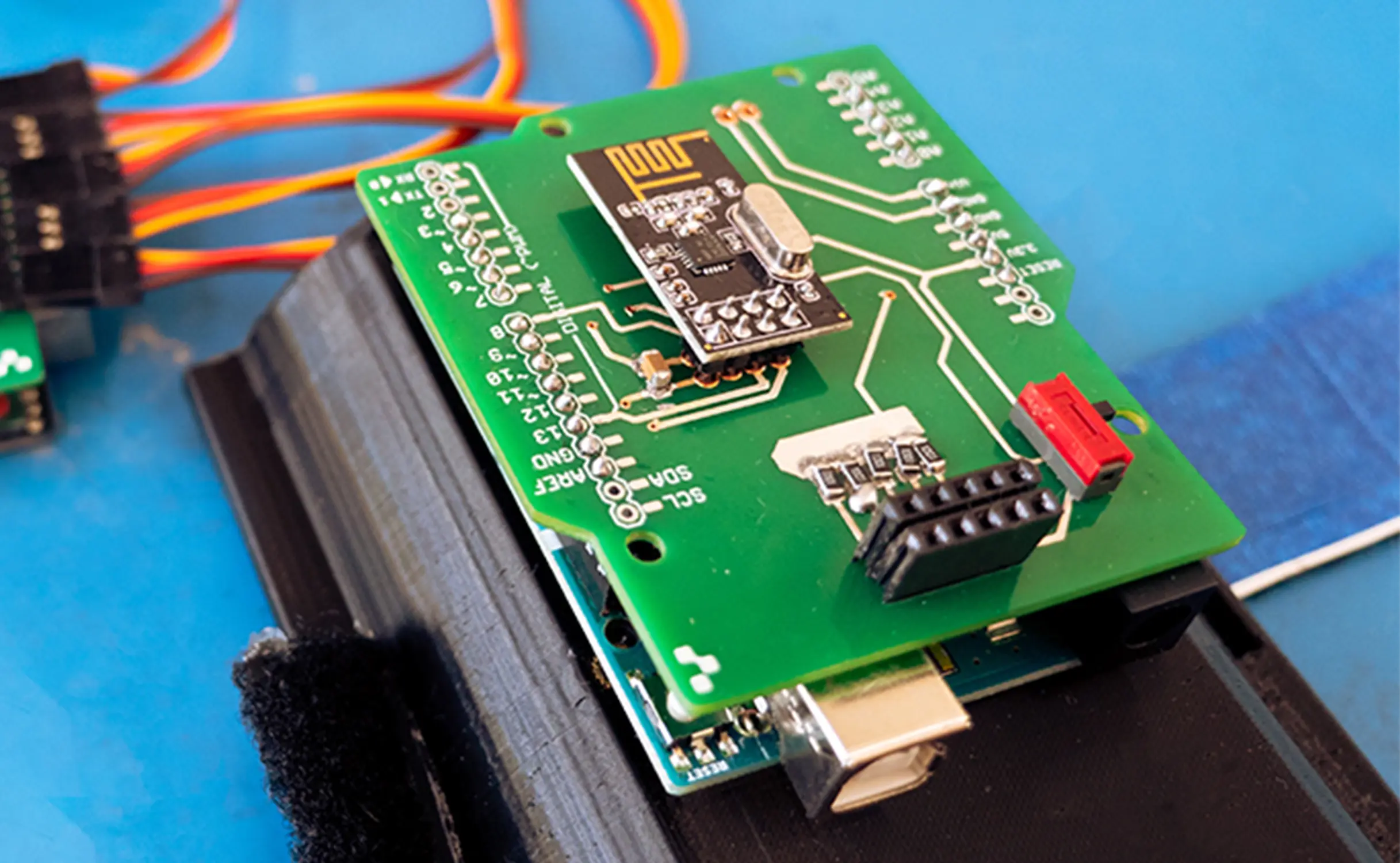
So, Dawson got to work. He started by building a robotic hand with movable fingers. The hand components were 3D-printed using non-flexible filament, the joints were made with TPU, and then assembled. He ran the wire up the fingers and connected these to servos. These would operate as tendons, so the hand could move. He connected the servos to an Arduino™ with a custom breakout board — which he made using the V-One.
Designing the control glove
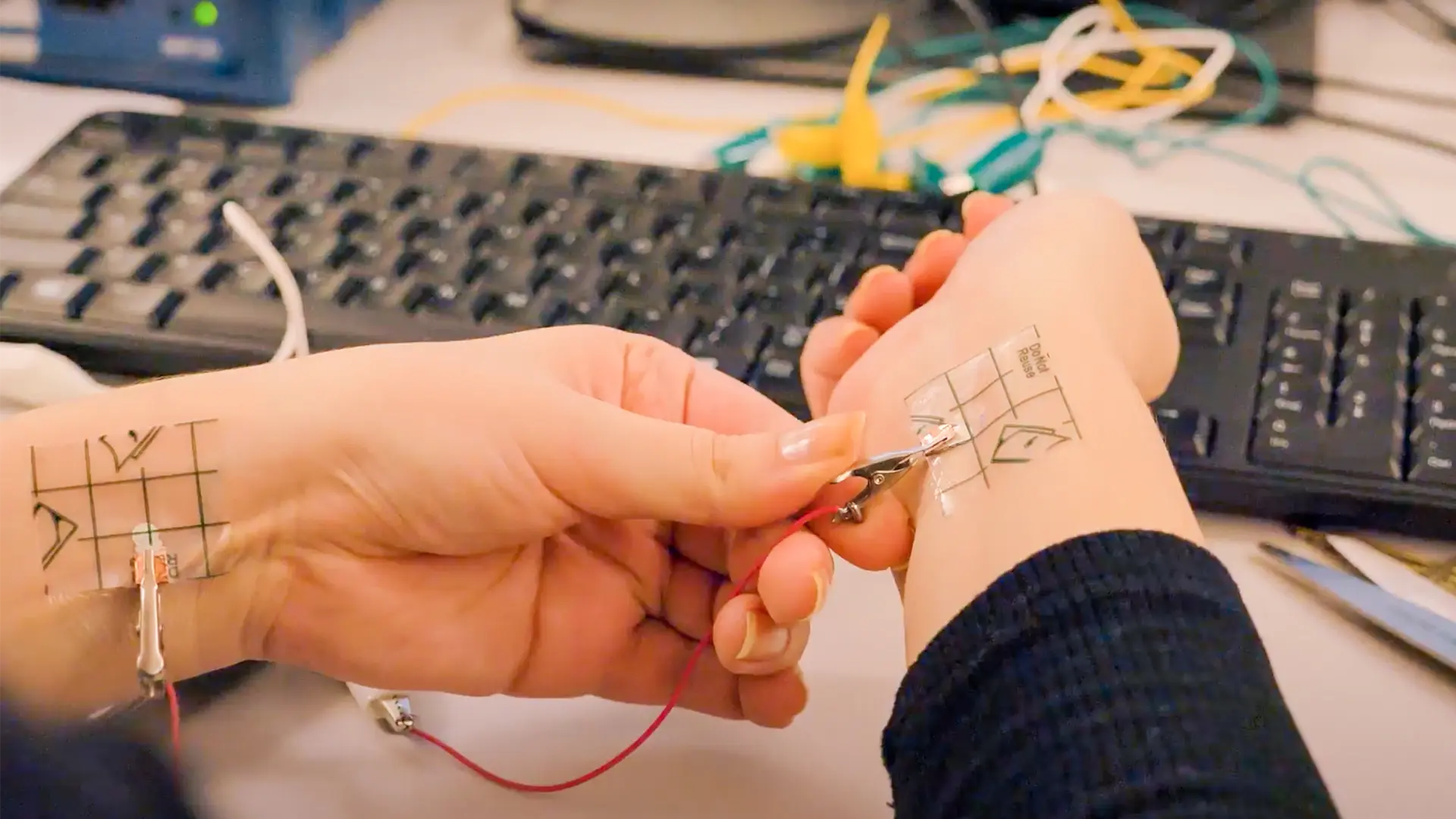
For the control glove, Dawson printed strain gauges onto TPU using NOVA and heat-pressed the strain gauges onto a fabric glove using a t-shirt press. Dawson wired a second Arduino and custom breakout board to the traces on the control glove using a conductive adhesive and mounted the board to a wrist strap.
The two boards communicate via Bluetooth® transceivers, so if all worked as it should, the board on the control glove would measure resistance in the strain gauges, then transmit movement instructions to the second board. This information would control the actuators of the robotic hand.
Of course, nothing goes exactly as planned, and Dawson hit a bit of a snag when he was designing the strain gauges. But, let’s rewind for a minute.
What is a strain gauge?
“A strange gauge is essentially just a resistor whose resistance value varies with changes in strain — being stretched, bent, or compressed,” Dawson explained. “You can think of it as a stretchable pipe with water running through it. As you stretch the pipe, it becomes longer but also narrower, restricting the flow”.
Now, apply this same principle to the traces in the control glove, which are made with stretchable conductive ink. As the traces stretch, they become longer and narrower, restricting the flow of electricity — it changes the resistance. The accompanying transmitter board interprets this change in resistance, and that information can then be used to control other devices — like the robotic hand.
Dawson’s biggest hurdle was designing the strain gauges for the control glove — finding the optimal procedure that would allow the gauges to fully stretch without losing conductivity completely, but still have a measurable change in resistance. In the end, he found that thicker traces resulted in more consistent continuity while stretching.
Stretchable conductive inks
Stretchable conductive ink gives you the ability to create a strain gauge on almost any stretchable material, and that has incredible potential to drive innovation. Industries across the board, from manufacturing to healthcare to wearable technology, are on the threshold of major change, thanks to the emerging field of flexible hybrid electronics.
Over the course of just two months, Dawson was able to successfully design and build a fully-functional robotic hand that mimics the movements of an operator wearing a control glove. Imagine what could be accomplished by seasoned researchers and engineers.
Potential applications
When asked about the potential applications for this kind of technology, Dawson lit up. “Why stop at just a hand? Why not use this technology to have a whole arm that mimics my own? Possibly even a full robot that mirrors my every move, and the majority of that could be achieved using similar techniques that were used for just the hand,” Dawson exclaimed. “The most exciting thing for me was the realization of the true possibilities that NOVA brings to the world of stretchable and flexible electronics”.
This technology could have life-altering and transformative potential in industries across the board — from biomedical applications and wearables to prosthetics. “I could see this technology being used in workplaces that present a high risk of injury, but still require the delicate handling of a human. For instance, if some work needs to be done on a machine but the area is radioactive or unsafe, the worker could remotely control this hand to perform the task, while staying in a safe location.” Dawson said. “This project could also be scaled up or down in size to meet specific requirements, for instance, you could have a small robotic hand do work inside a machine, in spaces where a human could not fit, being controlled by an operator outside the machine”.
You can read the finer details of Dawson’s work with NOVA and the V-One by checking out our white paper on this project.
Until next time…
The Voltera Team
P.S. Was this blog post helpful? Is there a different topic you’d like to learn more about? Let us know! We love answering questions, sharing knowledge, and helping to make the printed electronics industry more accessible to everyone.
Check out our Customer Stories
Take a closer look at what our customers are doing in the industry.