Webinar Recap: Printing Flexible Electronics for Soft Robotics

In this webinar, Matthew Chin, our Technical Support Specialist, explored how soft robotics benefits from direct ink writing (DIW) technologies like Voltera’s NOVA materials dispensing system and offered a deep dive into flexible and stretchable materials and substrates used in soft robotics applications.
We were joined by Nick Levinski, Wearable Mechanical Engineer at Proception AI, who introduced the fundamentals of soft robotics and shared hands-on insights from his projects at the University of Waterloo.
Webinar highlights
Fundamentals and key applications of soft robotics
Nick opened the session by explaining the core principles of soft robotics — robotic systems made from compliant materials like silicone, fabric, and thermoplastics that move and deform more like muscles than machines.
He covered common actuation strategies, including:
- Pneumatic actuators
- Thermally responsive materials
- Magnetically driven components
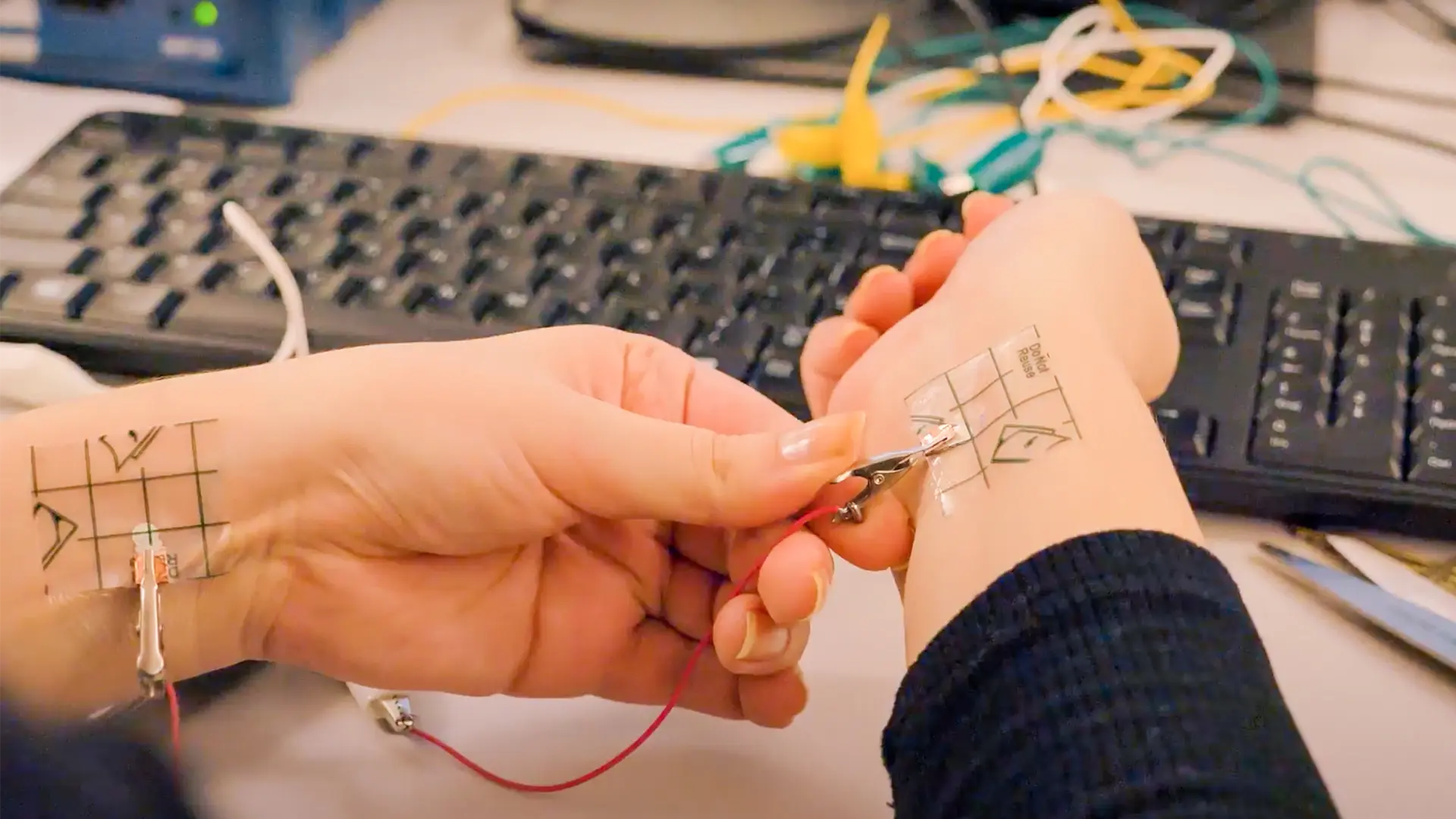
Nick then shared a few standout projects from his lab. The first one is a multilayer capacitive gripper built using NOVA with a stretchable TPU substrate. This 3D-printed soft gripper includes printed sensors heat-pressed into fabric for glove integration. The sensor data enables contact detection, paving the way for autonomous grasping.

Another interesting project is a lymphedema sleeve with microfluidics. Developed at the Waterloo Microfluids Lab, this wearable sleeve features soft actuators that simulate lymphatic massage therapy. By eliminating bulky valves and solenoids in favor of a passive microfluidic network, the team created a lightweight, portable device aimed at improving patient quality of life.
Overview of NOVA and materials for soft robotics
Next, Matthew introduced NOVA and its empowering role in rapid prototyping of soft robotics. He highlighted several materials used for wearables and soft robotics, all supported by NOVA, including:
- ACI SI3104 stretchable insulator
- ACI SC1502 stretchable carbon ink
- ACI FS0142 flexible silver ink
- ACI FC3203 flexible carbon ink
- VFP Silver Electron flexible silver ink
- VFP ECV003 green-tinted dielectric varnish
- Intexar™ TE-11C TPU substrate
- Normandy Coating Arcophane AA STS PET substrates
These materials are available on our store, with bundle discounts for those looking for affordable and hassle-free options.
Live Q&A
Soft robotics projects
Q: What is the maximum bending angle of the printed substrates on the robotic gripper?
A: Instead of a maximum bending angle, it’s more useful to think about minimum bend radius. For a 100-150 µm substrate, the minimum bend radius is typically around one millimeter (five to ten times the thickness). For the soft robotic gripper, the bending angle can reach around 100° in ideal cases. Nick tested fold lines, but achieving a clean crease was difficult. The bend radius became smaller than one millimeter unless we used a metal dowel to maintain it. However, that created a less desirable form factor, so we didn’t proceed with that approach.
Q: Can you elaborate on the computation used in the soft robotic system with flexible electronics? How complex is it, and what are the hardware constraints?
A: A practical approach is to build a simplified model of the soft robot that can run on-device (edge computing). This typically involves a linear approximation of how the robot deforms under a given pressure or current, combined with a feedback loop from embedded sensors and a basic control method (e.g., a proportional controller). Full physics-based finite element method (FEM) simulation of soft robots in real time is not yet feasible, though companies like NVIDIA are exploring it. For hardware complexity, the constraints depend on the application:
- Wearables prioritize minimizing footprint, weight, and wired connections, often requiring wireless modules with strict power limits.
- Robotic arms can rely on wired connections and external compute modules, making power and footprint less restrictive.
Q: What was the substrate of the printed silver used on the soft robotic gripper? Was it attached thermally?
A: Nick used Intexar TE-11C, attached using a heat‑press process (similar to a standard apparel heat press). When pressed onto a compatible fabric, it forms a strong thermal bond that resists delamination.
Q: Do sensors behave linearly? Can we rely on them for repeatable results, and how does fatigue affect performance?
A: Most soft sensors do not behave linearly. Their response is often inverse-square, logarithmic, or exponential, so they require calibration to achieve a linear approximation. Repeatability depends on:
- Strain and stress levels
- Material hysteresis
- Ink formulation
- Substrate deformation (e.g., plastic deformation at high strain)
- Actuation speed vs. material relaxation time
Pushing the materials too far reduces repeatability.
Printing with NOVA
Q: What is the curing process of the inks on your online store?
A: Most of these inks are cured in a box oven at temperatures above 100°C for 5-15 minutes, depending on the formulation (refer to each ink’s data sheet). For multilayer printing, each layer must be cured before printing the next one, especially when changing materials, to prevent mixing.
Q: Can inks be printed on glass, and has adhesion been proven?
A: Yes, some inks are formulated specifically for glass and ceramic substrates. Adhesion performance is provided in the manufacturer’s technical data sheet, along with any supporting test data. Consult the data sheet for the specific ink you're using.
Q: Are there inks suitable for flexible materials requiring curing below 100°C? Are there alternative curing options?
A: Yes. Some inks are designed for lower‑temperature curing, and many inks can be cured at lower temperatures over longer times while still achieving functional performance. This is often how we handle temperature‑sensitive substrates.
Q: Are there conductive inks and substrates that are biocompatible? For example, for implanted devices?
A: Some inks are biocompatible, such as silver-silver chloride inks designed for skin-contact applications (e.g., wearable heart-rate monitors). However, most are intended for surface or on-skin applications, not long-term implanted devices. Always check the ink’s data sheet for biocompatibility information.
Q: Are the inks on your online store only suitable for NOVA? Can they be used for spin coating or spray coating on TPU?
A: These inks are not exclusive to NOVA. They are primarily designed for screen printing, and NOVA provides a way to prototype with them without screens.
- Spin coating: not suitable because the viscosity is too high.
- Spray coating: generally unsuitable for the same reason.
- Screen printing: fully supported and ideal for production.
Q: Are there restrictions on surface roughness when printing on substrates?
A: Generally, surface roughness is not an issue. The nozzle prints about 60 µm above the surface, so printing quality is maintained. For very rough surfaces, you may need to deposit extra material to fill surface valleys. In normal use cases, roughness does not cause problems.
Q: Is there a way for research institutions to test their inks on NOVA as part of collaborations?
A: Yes. We offer printing as a service, and we have tested external inks to assess NOVA compatibility.If you have a custom ink you'd like evaluated, contact our sales team and they will guide you through the submission process.
Bonus for attendees
As a thank-you, we have a discount code in the webinar video for people interested in soft robotics.
Additional resources
Want to learn more about soft robotics and wearable electronics? Check out these resources:
- White paper: Printing Strain Gauges on TPU laminated on a Glove for Remote Hand Control
- Video: Printing Silver Conductive Ink on Cotton Fabric
- Keynote: ECG Sensors Printed with Gold | Voltera Keynote at TechBlick Printed Electronics Innovation Day 2024
Ready to talk about how NOVA can be used for your wearable or soft electronics application? Book a meeting to speak with one of our technical representatives.
Check out our Customer Stories
Take a closer look at what our customers are doing in the industry.